

 如果结果不匹配,请
如果结果不匹配,请 
 更多“某部门欲开发一款用于焊接印刷电路板芯片的机械手,请制订出该款…”相关的问题
更多“某部门欲开发一款用于焊接印刷电路板芯片的机械手,请制订出该款…”相关的问题
第1题
一套完整的弧焊机器人系统包括()。
A、机器人、机器人机械手、控制系统、焊接装置
B、机器人、机械手、焊接装置、焊件夹持装置
C、控制系统、焊接装置、焊件夹持装置
D、机器人机械手、控制系统、焊接装置、焊件夹持装置
第2题
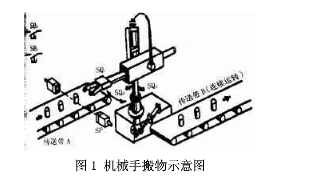
图为某机械手工作示意图。该机械手是将传送带A上的物品搬运到传送带B,为使动作准确,安装了限位开1ST~5ST,分
别对机械手进行抓紧、左旋、右旋、上升、下降动作的限位,并给出动作到位信号,机械手的放松由时间控制:光电开关PS负责检测传送带A上的物品是否到位;启动按钮1SB、停止按钮2SB用以启动、停止机械手和传送带A。传送带A、B由电动机拖动,机械手的上、下、左、右、抓、放动作由液压驱动,并分别由6个电磁阀来控制;传送带B为连续运转状态,不用PLC控制。试设计PLC控制系统。


 若忽略重力,当手部端点力F =
若忽略重力,当手部端点力F = 时,求相应的关节力矩τ。
时,求相应的关节力矩τ。














