题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
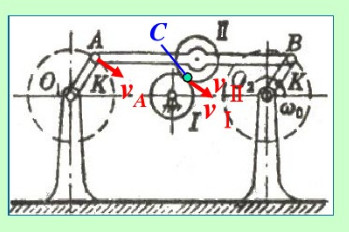
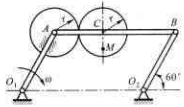
长均为2r的两平行曲柄O1A和O2B以匀角速度ω0分别绕轴O1和O2转动,如图所示.固连于连杆AB上的齿轮Ⅱ带动同样大
长均为2r的两平行曲柄O1A和O2B以匀角速度ω0分别绕轴O1和O2转动,如图所示.固连于连杆AB上的齿轮Ⅱ带动同样大小的齿轮Ⅰ作定轴转动.试求齿轮Ⅰ节圆上任一点的加速度的大小.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
长均为2r的两平行曲柄O1A和O2B以匀角速度ω0分别绕轴O1和O2转动,如图所示.固连于连杆AB上的齿轮Ⅱ带动同样大小的齿轮Ⅰ作定轴转动.试求齿轮Ⅰ节圆上任一点的加速度的大小.
如果结果不匹配,请 联系老师 获取答案
 更多“长均为2r的两平行曲柄O1A和O2B以匀角速度ω0分别绕轴O…”相关的问题
更多“长均为2r的两平行曲柄O1A和O2B以匀角速度ω0分别绕轴O…”相关的问题
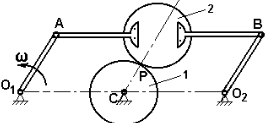
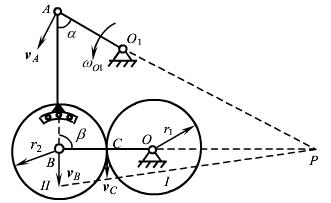
机构如图(a)所示。曲柄O1A绕O1轴转动,通过固连于连杆AB上的齿轮2带动齿轮1绕C轴转动。已知:O1A的角速度ω为常量,O1A=O2B=2r,且O1A∥O2B。两轮半径均为r。试求齿轮2和齿轮1分别在接触点P的速度和加速度。
在瓦特行星传动机构中,平衡杆O1A绕O1轴转动,并借连杆AB带动曲柄OB;而曲柄OB活动地装置在O轴上,如图所示。在O轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB固连于一体。已知: O1A=0.75mm,AB=1.5m;又平衡杆的速度ω=6rad/s.求当α=60°且β=90°时,曲柄OB和齿轮Ⅰ的角速度。
O1A=0.75mm,AB=1.5m;又平衡杆的速度ω=6rad/s.求当α=60°且β=90°时,曲柄OB和齿轮Ⅰ的角速度。

在曲柄齿轮椭圆规中,齿轮A和曲柄O1A固结为一体,齿轮C和齿轮A半径均为r并互相啮合,如图所示。图中AB=O1O2,O1A=O2B=0.4m。O1A以恒定的角速度ω绕轴O1转动,ω=0.2rad/s。M为轮C上一点,CM=0.1m。在图示瞬时,CM为铅垂,求此时M点的速度和加速度。

在瓦特行星传动机构中,平衡杆O1A绕O1轴转动,并借连杆AB带动曲柄OB;而曲柄OB活动地装置在O轴上,如图9-19所示。在O轴上装有齿轮Ⅰ,齿轮Ⅱ与连杆AB固连于一体。已知: ,O1A=0.75m,AB=1.5m;又平衡杆的角速度ω=6rad/s。求当γ=60°且β=90°时,曲柄OB和齿轮Ⅰ的角速度。
,O1A=0.75m,AB=1.5m;又平衡杆的角速度ω=6rad/s。求当γ=60°且β=90°时,曲柄OB和齿轮Ⅰ的角速度。

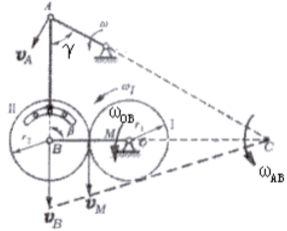
在图示瓦特行星传动机构中,平衡杆O1A绕O1轴转动,并借连杆AB带动曲柄OB绕定轴O转动;在O轴上还装有齿轮Ⅰ.齿轮Ⅱ与连杆AB连为一体,并带动齿轮Ⅰ转动.已知r1=r2=0.3√3m,O1A=0.75m,AB=1.5m;又平衡杆的角速度ωO1=6rad/s.求当θ=60°和β=90°时.曲柄OB及齿轮Ⅰ的角速度。
在曲柄齿轮椭圆规中,齿轮A和曲柄O1A固结为一体,齿轮C和齿轮A半径均为r并互相啮合,如图9-26所示。图中AB=O1O2,O1A=O2B=0.4m。O1A以恒定的角速度ω绕轴O1转动,ω=0.2rad/s。M为轮C上一点,CM=0.1m。在图示瞬时,CM为铅垂,求此时M点的速度和加速度。
瓦特行星传动机构如图所示,平衡杆O1A以角速度ω=6rad/s绕O1轴转动,连杆AB的一端与齿轮B固定,一端与A点铰接。曲柄OB与两齿轮B和O铰接,使两齿轮互相啮合。已知r=0.52m,O1A=0.75m,AB=1.5m,求在图示瞬时曲柄OB和齿轮O的角速度。
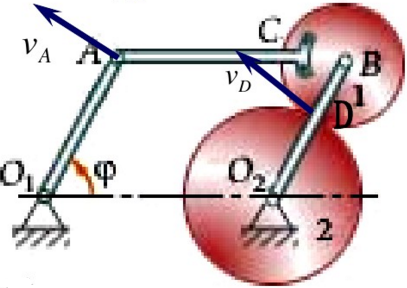
图示机构中齿轮Ⅰ固接在杆AC上,AB=O1O2.齿轮Ⅰ和半径为r2的齿轮Ⅱ啮合.齿轮Ⅱ可绕O2轴转动且和曲柄O2B没有联系.设O1A=O2B=l,φ=bsinωt.确定 时,轮Ⅱ的角速度和角加速度.
时,轮Ⅱ的角速度和角加速度.
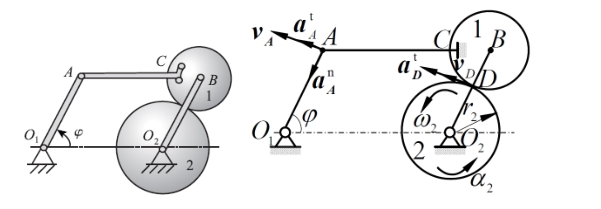
图示机构中齿轮1紧固在杆AC上,AB=O1O2,齿轮1和半径为r2的齿轮2啮合,齿轮2可绕O2,轴转动且和曲柄O2B没有联系。设 O1A=O2B=l,φ=bsinωt。试确定 时,轮2的角速度和角加速度。
时,轮2的角速度和角加速度。