

 如果结果不匹配,请
如果结果不匹配,请 
 更多“满足分离定理的系统是?()”相关的问题
更多“满足分离定理的系统是?()”相关的问题
第4题
传递函数阵G(s)的一个实现∑(A,B,C)为是最小实现的充要条件是( )。
A.∑(A,B,C)是能控的
B.∑(A,B,C)是能观测的
C.∑(A,B,C)是能控且能观测的
D.∑(A,B,C)是不能控且能观测的
第6题
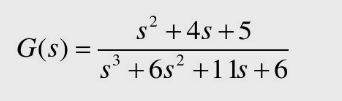
线性系统的传递函数为 (1)试确定a的取值,使系统为不能控,或成为不能观测的; (2)在上述a的取值下,求使系
线性系统的传递函数为
(1)试确定a的取值,使系统为不能控,或成为不能观测的;
(2)在上述a的取值下,求使系统为能控的状态空间描述;
(3)在上述a的取值下,求使系统为能观测的状态空间描述。
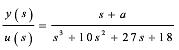
 试求其能控标准形实现和能观测标准形实现。
试求其能控标准形实现和能观测标准形实现。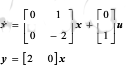 ,判断系统的能控性和能观测性,并求传递函数。
,判断系统的能控性和能观测性,并求传递函数。第10题
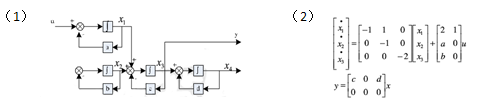
两个子系统的传递函数为 , (1)按G1(s)~G2(s)串联时,试分析组合系统的能控性、能观测性; (2)按G2(s)~G1(s)
两个子系统的传递函数为

(1)按G1(s)~G2(s)串联时,试分析组合系统的能控性、能观测性;
(2)按G2(s)~G1(s)串联时,试分析组合系统的能控性、能观测性;
(3)按G1(s)~G2(s)并联时,试分析组合系统的能控性、能观测性。















