 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
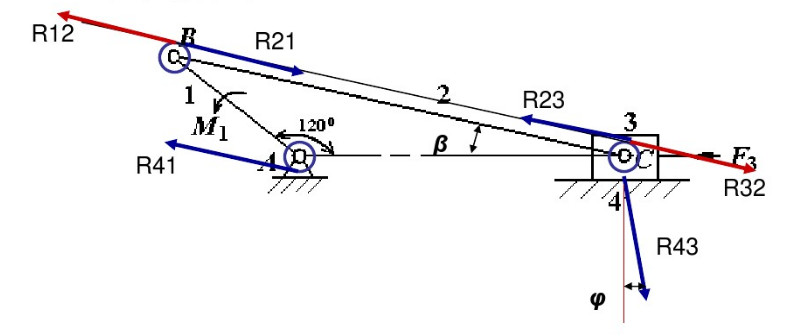
图(a)所示为曲柄滑块机构。曲柄1上作用着驱动力矩M1,已知机构的尺寸、摩擦角φ及转动副A、B、C处虚线所示的摩擦
图(a)所示为曲柄滑块机构。曲柄1上作用着驱动力矩M1,已知机构的尺寸、摩擦角φ及转动副A、B、C处虚线所示的摩擦圆。若不计各构件的重力和惯性力,试求机构处于图示位置时,滑块能克服的工作阻力Q。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
图(a)所示为曲柄滑块机构。曲柄1上作用着驱动力矩M1,已知机构的尺寸、摩擦角φ及转动副A、B、C处虚线所示的摩擦圆。若不计各构件的重力和惯性力,试求机构处于图示位置时,滑块能克服的工作阻力Q。
如果结果不匹配,请 联系老师 获取答案
 更多“图(a)所示为曲柄滑块机构。曲柄1上作用着驱动力矩M1,已知…”相关的问题
更多“图(a)所示为曲柄滑块机构。曲柄1上作用着驱动力矩M1,已知…”相关的问题
下图所示为一曲柄滑块机构。已知各构件的尺寸,各转动副轴颈的半径及其当量摩擦因数(摩擦圆已在图上转动副处用小圆表示),以及滑块和导路之间的摩擦因数f(φ=tg-1f)。机构因滑块受已知驱动力P(或曲柄受已知驱动力矩Md)的作用而运动。设不计各构件的自重和惯性力。试求


在图所示曲柄滑块机构中,曲柄1在驱动力矩M1作用下等速转动。设已知各转动剐的轴颈半径r=10mm,当量摩擦系数fv=0.1,移动副中的滑动摩擦系数f=0.15,lAB=100mm,lBC=350mm。各构件的质量和转动惯量略而不计。当M1=20N·m时,试求机构在图所示位置所能克服的有效阻力F3及机械效率。

个位置时作用在连杆AB上的作用力的真实方向(构件重量及惯性力略去不计)。



图13-34所示为曲柄滑槽机构,均质曲柄OA绕水平轴O作匀角速度转动。已知曲柄OA的质量为m1,OA=r,滑槽BC的质量为m2(重心在点D)。滑块A的重量和各处摩擦不计。求当曲柄转至图示位置时,滑槽BC的加速度、轴承O的约束力以及作用在曲柄上的力偶矩M。

在图上标出各运动副总反力的作用线和凸轮1上驱动力矩M1的方向。

铅垂面内曲柄连杆滑块机构中,均质直杆OA=r,AB=2r,质量分别为m和2m,滑块质量为m。曲柄OA匀速转动,角速度为ω0。在图14-23所示瞬时,滑块运行阻力为F。不计摩擦,求滑道对滑块的约束力及OA上的驱动力偶矩Mo。

图示为曲柄滑槽机构,均质曲柄OA绕水平轴O作匀角速度转动。已知曲柄OA的质量为m1,OA=r,滑槽BC的质量为m2(重心在点D)。滑块A的重量和各处摩擦不计。求当曲柄转至图示位置时,滑槽BC的加速度、轴承O的约束力以及作用在曲柄上的力偶矩M。


















