 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
下图所示为一曲柄滑块机构。已知各构件的尺寸,各转动副轴颈的半径及其当量摩擦因数(摩擦圆已在图上转动副处
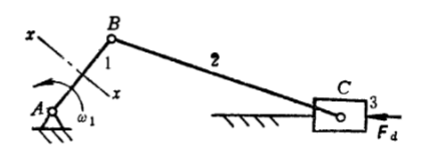
下图所示为一曲柄滑块机构。已知各构件的尺寸,各转动副轴颈的半径及其当量摩擦因数(摩擦圆已在图上转动副处用小圆表示),以及滑块和导路之间的摩擦因数f(φ=tg-1f)。机构因滑块受已知驱动力P(或曲柄受已知驱动力矩Md)的作用而运动。设不计各构件的自重和惯性力。试求

查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“下图所示为一曲柄滑块机构。已知各构件的尺寸,各转动副轴颈的半…”相关的问题
更多“下图所示为一曲柄滑块机构。已知各构件的尺寸,各转动副轴颈的半…”相关的问题

























