题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
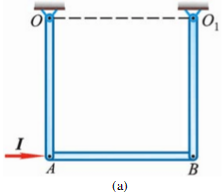
两均质杆OA和O1B,上端铰支固定,下端与均质杆AB铰接,使杆OA和O1B铅垂,AB水平,都在铅垂面内,如图(a)所示。设各
两均质杆OA和O1B,上端铰支固定,下端与均质杆AB铰接,使杆OA和O1B铅垂,AB水平,都在铅垂面内,如图(a)所示。设各铰链光滑,三根杆重量相等,且OA=O1B=AB=l,开始时静止。若在点A处作用一水平向右的碰撞冲量I,求杆OA和O1B的偏角。

查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“两均质杆OA和O1B,上端铰支固定,下端与均质杆AB铰接,使…”相关的问题
更多“两均质杆OA和O1B,上端铰支固定,下端与均质杆AB铰接,使…”相关的问题

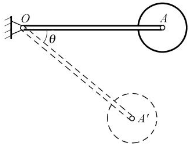
 角的瞬时,杆的角速度和角加速度。
角的瞬时,杆的角速度和角加速度。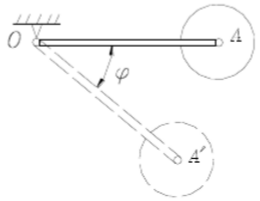
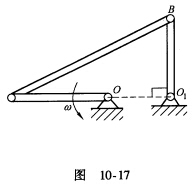 , 曲柄OA的角速度ω=3rad/s,当曲柄OA在水平位置而曲柄O1B恰好在铅垂位置时,求连杆AB和曲柄O1B的角速度。
, 曲柄OA的角速度ω=3rad/s,当曲柄OA在水平位置而曲柄O1B恰好在铅垂位置时,求连杆AB和曲柄O1B的角速度。